বায়ুমণ্ডলীয় সনাক্তকরণ পদ্ধতি
বায়ুমণ্ডলীয় সনাক্তকরণের প্রধান পদ্ধতিগুলি হল: মাইক্রোওয়েভ রাডার সাউন্ডিং পদ্ধতি, বায়ুবাহিত বা রকেট সাউন্ডিং পদ্ধতি, সাউন্ডিং বেলুন, স্যাটেলাইট রিমোট সেন্সিং এবং LIDAR। মাইক্রোওয়েভ রাডার ক্ষুদ্র কণা সনাক্ত করতে পারে না কারণ বায়ুমণ্ডলে প্রেরিত মাইক্রোওয়েভগুলি মিলিমিটার বা সেন্টিমিটার তরঙ্গ, যার তরঙ্গদৈর্ঘ্য দীর্ঘ এবং ক্ষুদ্র কণাগুলির সাথে, বিশেষ করে বিভিন্ন অণুর সাথে যোগাযোগ করতে পারে না।
বায়ুবাহিত এবং রকেট শব্দ পদ্ধতিগুলি বেশি ব্যয়বহুল এবং দীর্ঘ সময়ের জন্য পর্যবেক্ষণ করা যায় না। যদিও বেলুন শব্দের খরচ কম, তবে বাতাসের গতির দ্বারা এগুলি বেশি প্রভাবিত হয়। স্যাটেলাইট রিমোট সেন্সিং অন-বোর্ড রাডার ব্যবহার করে বৃহৎ পরিসরে বৈশ্বিক বায়ুমণ্ডল সনাক্ত করতে পারে, তবে স্থানিক রেজোলিউশন তুলনামূলকভাবে কম। বায়ুমণ্ডলে একটি লেজার রশ্মি নির্গত করে এবং বায়ুমণ্ডলীয় অণু বা অ্যারোসল এবং লেজারের মধ্যে মিথস্ক্রিয়া (বিচ্ছুরণ এবং শোষণ) ব্যবহার করে বায়ুমণ্ডলীয় পরামিতিগুলি বের করতে লিডার ব্যবহার করা হয়।
লেজারের শক্তিশালী দিকনির্দেশনা, স্বল্প তরঙ্গদৈর্ঘ্য (মাইক্রন তরঙ্গ) এবং সংকীর্ণ পালস প্রস্থ এবং ফটোডিটেক্টরের (ফটোমাল্টিপ্লায়ার টিউব, একক ফোটন ডিটেক্টর) উচ্চ সংবেদনশীলতার কারণে, লিডার উচ্চ নির্ভুলতা এবং বায়ুমণ্ডলীয় পরামিতিগুলির উচ্চ স্থানিক এবং অস্থায়ী রেজোলিউশন সনাক্তকরণ অর্জন করতে পারে। এর উচ্চ নির্ভুলতা, উচ্চ স্থানিক এবং অস্থায়ী রেজোলিউশন এবং ক্রমাগত পর্যবেক্ষণের কারণে, LIDAR বায়ুমণ্ডলীয় অ্যারোসল, মেঘ, বায়ু দূষণকারী, বায়ুমণ্ডলীয় তাপমাত্রা এবং বাতাসের গতি সনাক্তকরণে দ্রুত বিকাশ করছে।
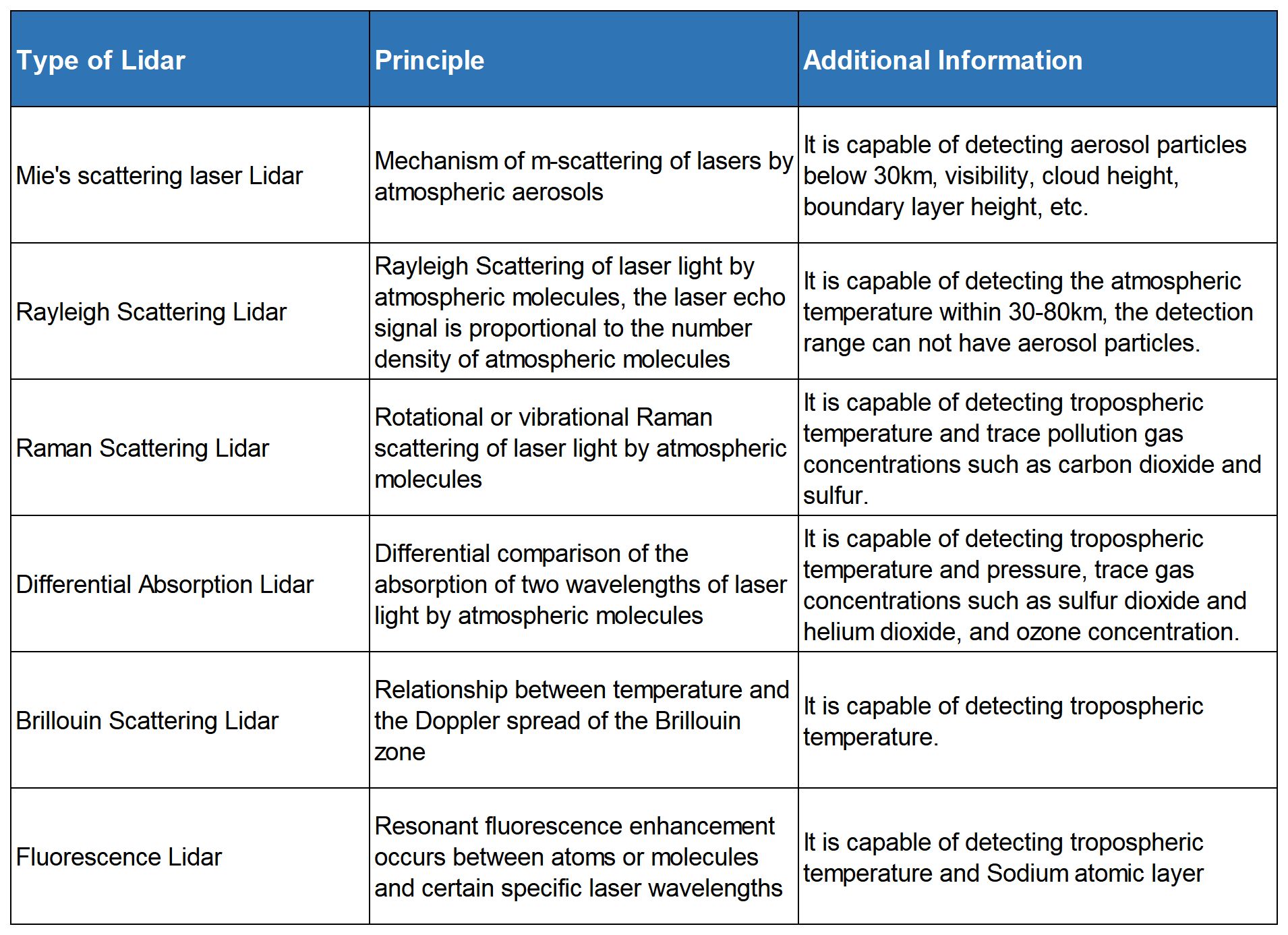
লিডারের প্রকারগুলি নিম্নলিখিত সারণীতে দেখানো হয়েছে:
বায়ুমণ্ডলীয় সনাক্তকরণ পদ্ধতি
বায়ুমণ্ডলীয় সনাক্তকরণের প্রধান পদ্ধতিগুলি হল: মাইক্রোওয়েভ রাডার সাউন্ডিং পদ্ধতি, বায়ুবাহিত বা রকেট সাউন্ডিং পদ্ধতি, সাউন্ডিং বেলুন, স্যাটেলাইট রিমোট সেন্সিং এবং LIDAR। মাইক্রোওয়েভ রাডার ক্ষুদ্র কণা সনাক্ত করতে পারে না কারণ বায়ুমণ্ডলে প্রেরিত মাইক্রোওয়েভগুলি মিলিমিটার বা সেন্টিমিটার তরঙ্গ, যার তরঙ্গদৈর্ঘ্য দীর্ঘ এবং ক্ষুদ্র কণাগুলির সাথে, বিশেষ করে বিভিন্ন অণুর সাথে যোগাযোগ করতে পারে না।
বায়ুবাহিত এবং রকেট শব্দ পদ্ধতিগুলি বেশি ব্যয়বহুল এবং দীর্ঘ সময়ের জন্য পর্যবেক্ষণ করা যায় না। যদিও বেলুন শব্দের খরচ কম, তবে বাতাসের গতির দ্বারা এগুলি বেশি প্রভাবিত হয়। স্যাটেলাইট রিমোট সেন্সিং অন-বোর্ড রাডার ব্যবহার করে বৃহৎ পরিসরে বৈশ্বিক বায়ুমণ্ডল সনাক্ত করতে পারে, তবে স্থানিক রেজোলিউশন তুলনামূলকভাবে কম। বায়ুমণ্ডলে একটি লেজার রশ্মি নির্গত করে এবং বায়ুমণ্ডলীয় অণু বা অ্যারোসল এবং লেজারের মধ্যে মিথস্ক্রিয়া (বিচ্ছুরণ এবং শোষণ) ব্যবহার করে বায়ুমণ্ডলীয় পরামিতিগুলি বের করতে লিডার ব্যবহার করা হয়।
লেজারের শক্তিশালী দিকনির্দেশনা, স্বল্প তরঙ্গদৈর্ঘ্য (মাইক্রন তরঙ্গ) এবং সংকীর্ণ পালস প্রস্থ এবং ফটোডিটেক্টরের (ফটোমাল্টিপ্লায়ার টিউব, একক ফোটন ডিটেক্টর) উচ্চ সংবেদনশীলতার কারণে, লিডার উচ্চ নির্ভুলতা এবং বায়ুমণ্ডলীয় পরামিতিগুলির উচ্চ স্থানিক এবং অস্থায়ী রেজোলিউশন সনাক্তকরণ অর্জন করতে পারে। এর উচ্চ নির্ভুলতা, উচ্চ স্থানিক এবং অস্থায়ী রেজোলিউশন এবং ক্রমাগত পর্যবেক্ষণের কারণে, LIDAR বায়ুমণ্ডলীয় অ্যারোসল, মেঘ, বায়ু দূষণকারী, বায়ুমণ্ডলীয় তাপমাত্রা এবং বাতাসের গতি সনাক্তকরণে দ্রুত বিকাশ করছে।
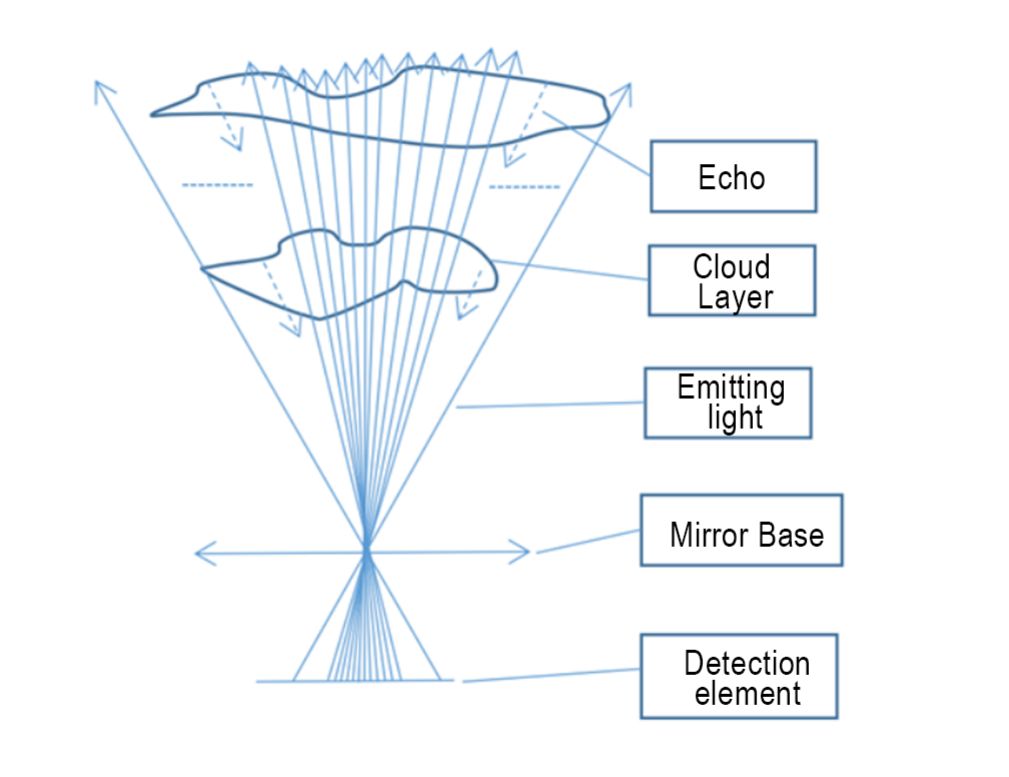
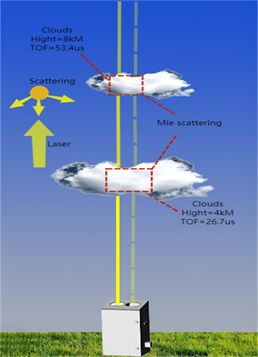
মেঘ পরিমাপ রাডারের নীতির পরিকল্পিত চিত্র
মেঘের স্তর: বাতাসে ভাসমান মেঘের স্তর; নির্গত আলো: একটি নির্দিষ্ট তরঙ্গদৈর্ঘ্যের একটি সমন্বিত রশ্মি; প্রতিধ্বনি: মেঘের স্তরের মধ্য দিয়ে নির্গমনের পরে উৎপন্ন পশ্চাদপট সংকেত; আয়না ভিত্তি: টেলিস্কোপ সিস্টেমের সমতুল্য পৃষ্ঠ; সনাক্তকরণ উপাদান: দুর্বল প্রতিধ্বনি সংকেত গ্রহণ করতে ব্যবহৃত আলোক বৈদ্যুতিক যন্ত্র।
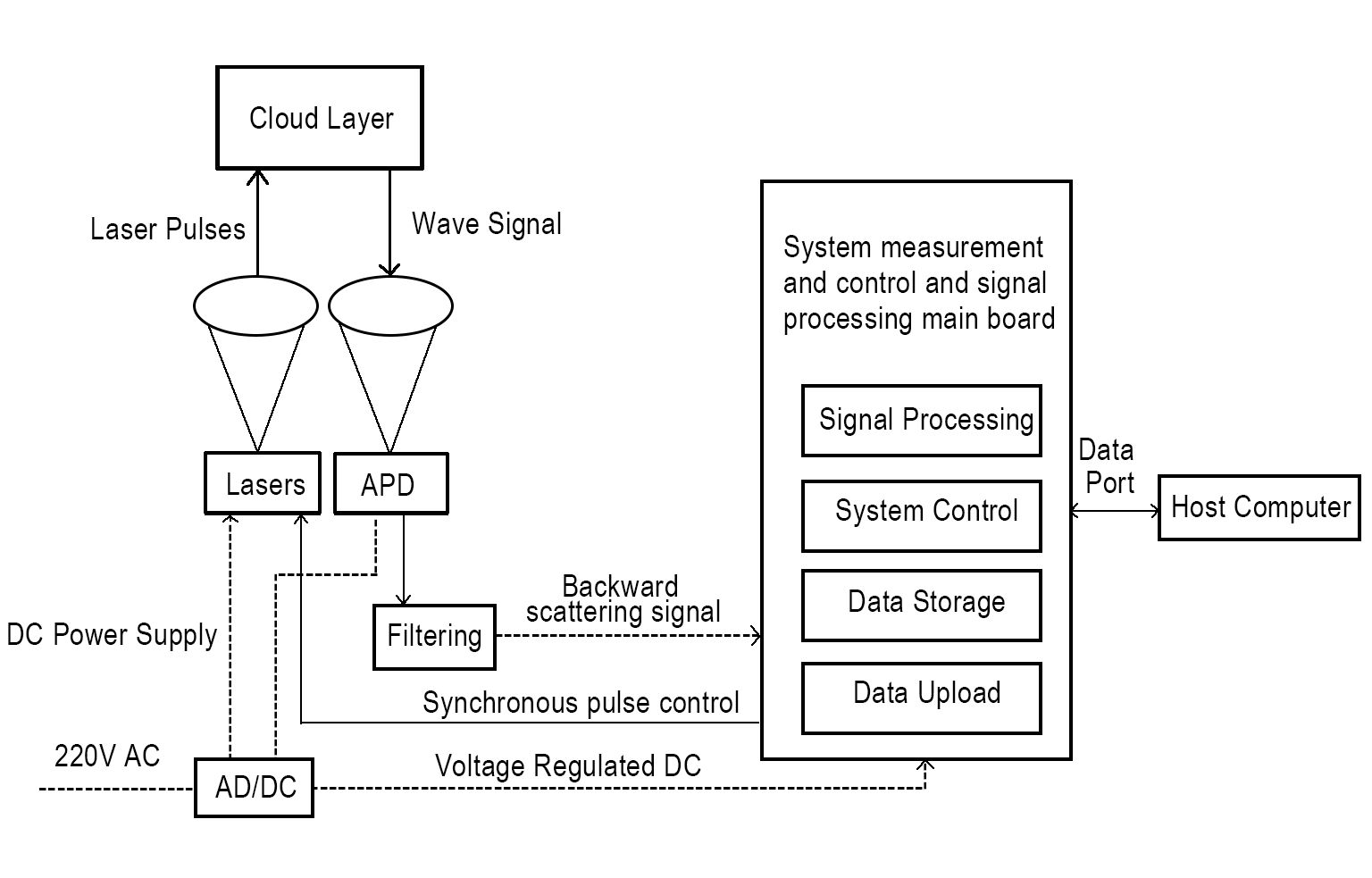
ক্লাউড পরিমাপ রাডার সিস্টেমের কার্যকরী কাঠামো
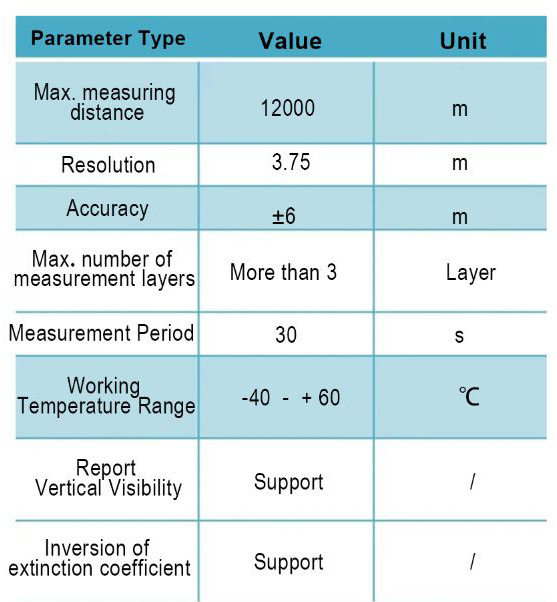
লুমিস্পট টেক ক্লাউড পরিমাপের প্রধান প্রযুক্তিগত পরামিতি লিডার
পণ্যের ছবি

আবেদন

পণ্যের কাজের স্থিতি চিত্র
পোস্টের সময়: মে-০৯-২০২৩