ভূমিকা
১৯৬০-এর দশকের শেষের দিক থেকে এবং ১৯৭০-এর দশকের গোড়ার দিকে, বেশিরভাগ ঐতিহ্যবাহী আকাশ আলোকচিত্র ব্যবস্থা বায়ুবাহিত এবং মহাকাশ তড়িৎ-অপটিক্যাল এবং ইলেকট্রনিক সেন্সর সিস্টেম দ্বারা প্রতিস্থাপিত হয়েছে। যদিও ঐতিহ্যবাহী আকাশ আলোকচিত্র মূলত দৃশ্যমান-আলো তরঙ্গদৈর্ঘ্যে কাজ করে, আধুনিক বায়ুবাহিত এবং ভূমি-ভিত্তিক দূরবর্তী সংবেদন ব্যবস্থা দৃশ্যমান আলো, প্রতিফলিত ইনফ্রারেড, তাপীয় ইনফ্রারেড এবং মাইক্রোওয়েভ বর্ণালী অঞ্চলগুলিকে আবৃত করে ডিজিটাল ডেটা তৈরি করে। আকাশ আলোকচিত্রে ঐতিহ্যবাহী দৃশ্য ব্যাখ্যা পদ্ধতি এখনও সহায়ক। তবুও, দূরবর্তী সংবেদন বিভিন্ন ধরণের অ্যাপ্লিকেশনকে অন্তর্ভুক্ত করে, যার মধ্যে লক্ষ্য বৈশিষ্ট্যের তাত্ত্বিক মডেলিং, বস্তুর বর্ণালী পরিমাপ এবং তথ্য নিষ্কাশনের জন্য ডিজিটাল চিত্র বিশ্লেষণের মতো অতিরিক্ত কার্যকলাপ অন্তর্ভুক্ত রয়েছে।
রিমোট সেন্সিং, যা যোগাযোগবিহীন দীর্ঘ-পরিসরের সনাক্তকরণ কৌশলের সকল দিককে বোঝায়, এটি এমন একটি পদ্ধতি যা লক্ষ্যবস্তুর বৈশিষ্ট্য সনাক্তকরণ, রেকর্ড এবং পরিমাপ করার জন্য তড়িৎচুম্বকত্ব ব্যবহার করে এবং সংজ্ঞাটি প্রথম 1950-এর দশকে প্রস্তাব করা হয়েছিল। রিমোট সেন্সিং এবং ম্যাপিংয়ের ক্ষেত্রটি 2টি সেন্সিং মোডে বিভক্ত: সক্রিয় এবং নিষ্ক্রিয় সেন্সিং, যার মধ্যে লিডার সেন্সিং সক্রিয়, লক্ষ্যবস্তুতে আলো নির্গত করতে এবং সেখান থেকে প্রতিফলিত আলো সনাক্ত করতে নিজস্ব শক্তি ব্যবহার করতে সক্ষম।
সক্রিয় লিডার সেন্সিং এবং প্রয়োগ
লিডার (আলো সনাক্তকরণ এবং পরিসীমা) এমন একটি প্রযুক্তি যা লেজার সংকেত নির্গত এবং গ্রহণের সময়ের উপর ভিত্তি করে দূরত্ব পরিমাপ করে। কখনও কখনও এয়ারবর্ন লিডারকে এয়ারবর্ন লেজার স্ক্যানিং, ম্যাপিং বা লিডারের সাথে বিনিময়যোগ্যভাবে প্রয়োগ করা হয়।
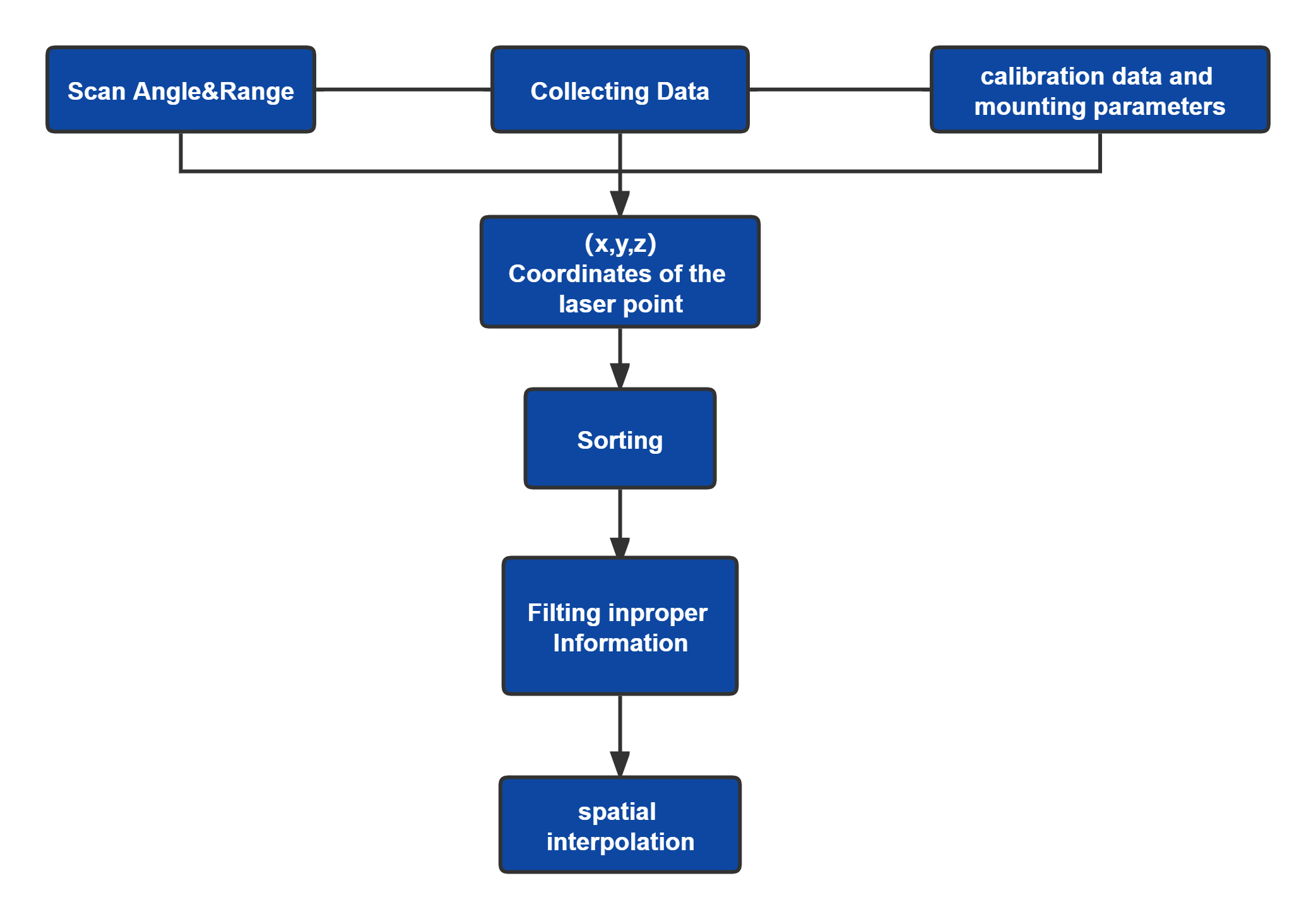
এটি একটি সাধারণ ফ্লোচার্ট যা LiDAR ব্যবহারের সময় পয়েন্ট ডেটা প্রক্রিয়াকরণের প্রধান ধাপগুলি দেখায়। (x, y, z) স্থানাঙ্ক সংগ্রহ করার পরে, এই পয়েন্টগুলি বাছাই করলে ডেটা রেন্ডারিং এবং প্রক্রিয়াকরণের দক্ষতা উন্নত হতে পারে। LiDAR পয়েন্টগুলির জ্যামিতিক প্রক্রিয়াকরণের পাশাপাশি, LiDAR প্রতিক্রিয়া থেকে প্রাপ্ত তীব্রতার তথ্যও কার্যকর।
সমস্ত রিমোট সেন্সিং এবং ম্যাপিং অ্যাপ্লিকেশনে, LiDAR-এর সূর্যালোক এবং অন্যান্য আবহাওয়ার প্রভাব থেকে স্বাধীনভাবে আরও সঠিক পরিমাপ পাওয়ার স্বতন্ত্র সুবিধা রয়েছে। একটি সাধারণ রিমোট সেন্সিং সিস্টেমে দুটি অংশ থাকে, একটি লেজার রেঞ্জফাইন্ডার এবং অবস্থান নির্ধারণের জন্য একটি পরিমাপ সেন্সর, যা জ্যামিতিক বিকৃতি ছাড়াই সরাসরি 3D তে ভৌগলিক পরিবেশ পরিমাপ করতে পারে কারণ কোনও ইমেজিং জড়িত থাকে না (3D জগৎ 2D সমতলে চিত্রিত করা হয়)।
আমাদের কিছু লিডার উৎস
সেন্সরের জন্য চোখের জন্য নিরাপদ LiDAR লেজার সোর্স পছন্দ


