ভূমিকা
1960-এর দশকের শেষের দিকে এবং 1970-এর দশকের গোড়ার দিকে, বেশিরভাগ ঐতিহ্যবাহী বায়বীয় ফটোগ্রাফি সিস্টেমগুলি বায়ুবাহিত এবং মহাকাশের ইলেক্ট্রো-অপটিক্যাল এবং ইলেকট্রনিক সেন্সর সিস্টেম দ্বারা প্রতিস্থাপিত হয়েছে। যদিও ঐতিহ্যগত বায়বীয় ফটোগ্রাফি প্রাথমিকভাবে দৃশ্যমান-আলো তরঙ্গদৈর্ঘ্যে কাজ করে, আধুনিক বায়ুবাহিত এবং স্থল-ভিত্তিক রিমোট সেন্সিং সিস্টেমগুলি দৃশ্যমান আলো, প্রতিফলিত ইনফ্রারেড, থার্মাল ইনফ্রারেড এবং মাইক্রোওয়েভ বর্ণালী অঞ্চলগুলিকে কভার করে ডিজিটাল ডেটা তৈরি করে। বায়বীয় ফটোগ্রাফিতে ঐতিহ্যগত চাক্ষুষ ব্যাখ্যা পদ্ধতি এখনও সহায়ক। এখনও, রিমোট সেন্সিং অ্যাপ্লিকেশনগুলির একটি বিস্তৃত পরিসরকে কভার করে, যার মধ্যে অতিরিক্ত ক্রিয়াকলাপ যেমন লক্ষ্য বৈশিষ্ট্যের তাত্ত্বিক মডেলিং, বস্তুর বর্ণালী পরিমাপ এবং তথ্য নিষ্কাশনের জন্য ডিজিটাল চিত্র বিশ্লেষণ।
রিমোট সেন্সিং, যা অ-যোগাযোগ দূর-পরিসর সনাক্তকরণ কৌশলগুলির সমস্ত দিককে বোঝায়, এটি এমন একটি পদ্ধতি যা একটি লক্ষ্যের বৈশিষ্ট্য সনাক্ত, রেকর্ড এবং পরিমাপ করতে ইলেক্ট্রোম্যাগনেটিজম ব্যবহার করে এবং সংজ্ঞাটি প্রথম 1950 সালে প্রস্তাবিত হয়েছিল। রিমোট সেন্সিং এবং ম্যাপিংয়ের ক্ষেত্র, এটি 2টি সেন্সিং মোডে বিভক্ত: সক্রিয় এবং প্যাসিভ সেন্সিং, যার মধ্যে লিডার সেন্সিং সক্রিয়, লক্ষ্যে আলো নির্গত করতে এবং এটি থেকে প্রতিফলিত আলো সনাক্ত করতে নিজস্ব শক্তি ব্যবহার করতে সক্ষম।
সক্রিয় লিডার সেন্সিং এবং অ্যাপ্লিকেশন
লিডার (আলো সনাক্তকরণ এবং রেঞ্জিং) এমন একটি প্রযুক্তি যা লেজার সংকেত নির্গত এবং গ্রহণের সময়ের উপর ভিত্তি করে দূরত্ব পরিমাপ করে। কখনও কখনও Airborne LiDAR বায়ুবাহিত লেজার স্ক্যানিং, ম্যাপিং বা LiDAR এর সাথে বিনিময়যোগ্যভাবে প্রয়োগ করা হয়।
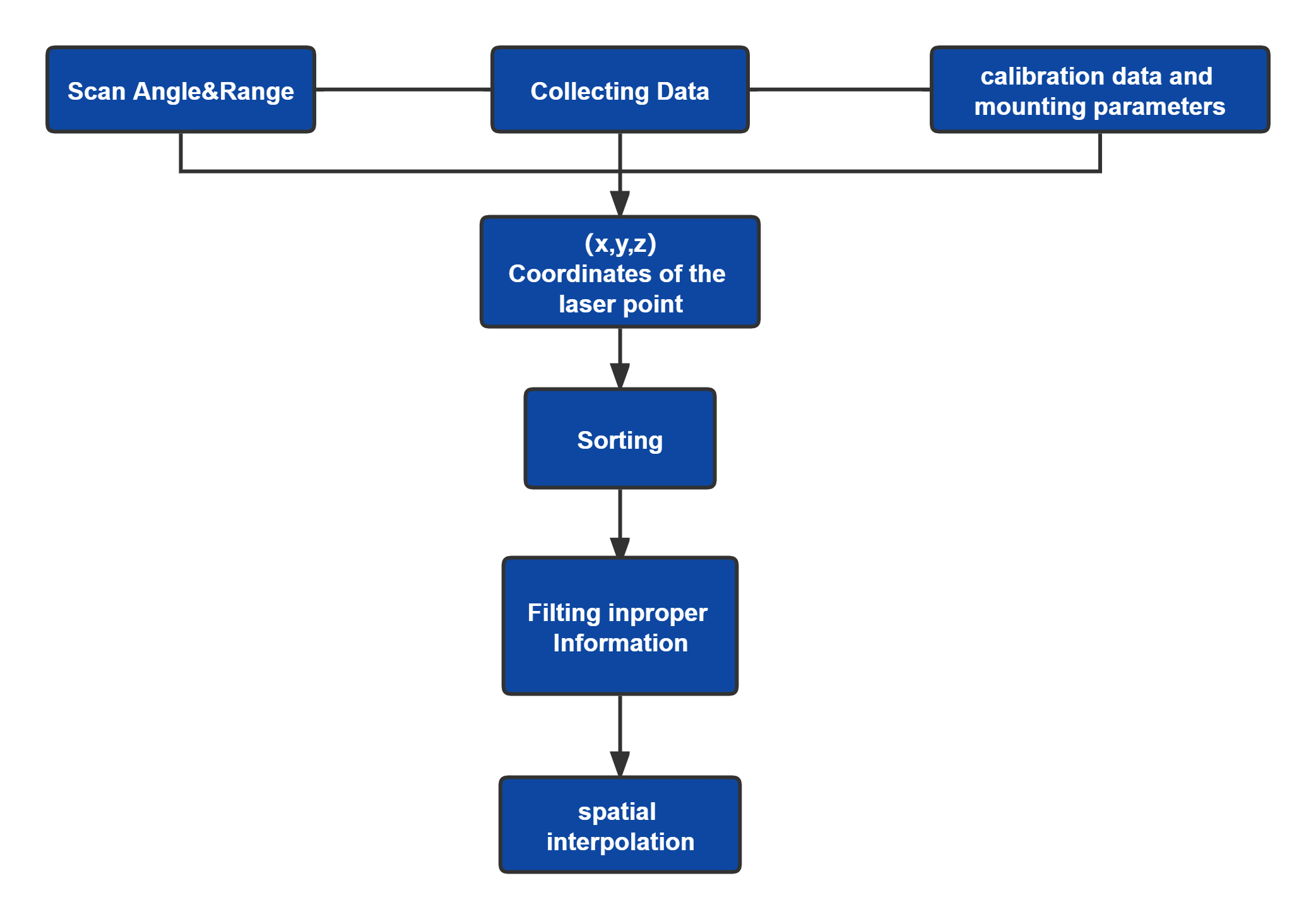
এটি একটি সাধারণ ফ্লোচার্ট যা LiDAR ব্যবহারের সময় পয়েন্ট ডেটা প্রক্রিয়াকরণের প্রধান ধাপগুলি দেখায়। ( x, y, z) স্থানাঙ্কগুলি সংগ্রহ করার পরে, এই পয়েন্টগুলি বাছাই করা ডেটা রেন্ডারিং এবং প্রক্রিয়াকরণের দক্ষতা উন্নত করতে পারে। LiDAR পয়েন্টের জ্যামিতিক প্রক্রিয়াকরণ ছাড়াও, LiDAR প্রতিক্রিয়া থেকে তীব্রতার তথ্যও দরকারী।
সমস্ত রিমোট সেন্সিং এবং ম্যাপিং অ্যাপ্লিকেশনগুলিতে, সূর্যালোক এবং অন্যান্য আবহাওয়ার প্রভাব থেকে স্বাধীনভাবে আরও সঠিক পরিমাপ পাওয়ার জন্য LiDAR-এর স্বতন্ত্র সুবিধা রয়েছে। একটি সাধারণ রিমোট সেন্সিং সিস্টেমে দুটি অংশ থাকে, একটি লেজার রেঞ্জফাইন্ডার এবং অবস্থান নির্ধারণের জন্য একটি পরিমাপ সেন্সর, যা জ্যামিতিক বিকৃতি ছাড়াই 3D তে ভৌগলিক পরিবেশকে সরাসরি পরিমাপ করতে পারে কারণ কোনও ইমেজিং জড়িত নেই (3D বিশ্ব 2D সমতলে চিত্রিত হয়েছে)।
আমাদের কিছু লিডার উৎস
সেন্সরের জন্য চোখ-নিরাপদ LiDAR লেজার সোর্স চয়েস


